|
Wyatt
1.0.1
|
#include <EncoderAdapter.h>
Public Member Functions | |
| EncoderAdapter (int channelA, int channelB, int ticksPerRev, Hardware hardware) | |
| ~EncoderAdapter () override | |
| void * | run () override |
| long | getCount () |
| void | resetCount () |
| double | getSpeedRPM () |
| std::list< IMessage * > * | read () override |
| void | write (IMessage *message) override |
 Public Member Functions inherited from Thread Public Member Functions inherited from Thread | |
| int | start () |
| int | join () |
| int | detach () |
| void | signal (int signal) |
| pthread_t | self () |
| Public Member Functions inherited from IHardwareInterface | |
| virtual | ~IHardwareInterface () |
Additional Inherited Members | |
| Protected Attributes inherited from Thread | |
| std::atomic< int > | m_signal |
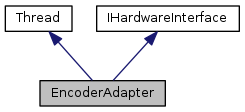
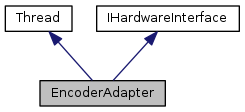
Hardware adapter for the Pololu encoders. This class polls pins on the RaspberryPi, counts the number of ticks, and translates this data into a specific RPM. Periodically, the communicator requests the current RPM of the encoders to inject it into the EncoderSensor object. TODO: This class should translate the data into a specific velocity in cm/s
Definition at line 21 of file EncoderAdapter.h.
| EncoderAdapter::EncoderAdapter | ( | int | channelA, |
| int | channelB, | ||
| int | ticksPerRev, | ||
| Hardware | hardware | ||
| ) |
Counts a two-channel encoder.
| channelA | WiringPi Pin for channel A. |
| channelB | WiringPi Pin for channel B. |
| ticksPerRev | Number of ticks per revolution on this encoder. |
Definition at line 4 of file EncoderAdapter.cpp.
|
override |
Destructs the encoder counter.
Definition at line 19 of file EncoderAdapter.cpp.
| long EncoderAdapter::getCount | ( | ) |
Get the current count from the encoder.
Definition at line 62 of file EncoderAdapter.cpp.
| double EncoderAdapter::getSpeedRPM | ( | ) |
Get the encoder current speed in RPM.
Definition at line 81 of file EncoderAdapter.cpp.
|
overridevirtual |
Read a list containing a message with the current encoder count for this encoder, and a message with the current speed.
Implements IHardwareInterface.
Definition at line 72 of file EncoderAdapter.cpp.
| void EncoderAdapter::resetCount | ( | ) |
Reset the encoder count to 0.
Definition at line 67 of file EncoderAdapter.cpp.
|
overridevirtual |
Runs the encoder counter worker thread.
Implements Thread.
Definition at line 24 of file EncoderAdapter.cpp.
|
inlineoverridevirtual |
Write a message to the peripheral. Deletes the message pointer.
| msg | A Message to be sent |
Implements IHardwareInterface.
Definition at line 62 of file EncoderAdapter.h.
 1.8.11
1.8.11

